運動捕捉系統
系統簡介
碩士研究 Project
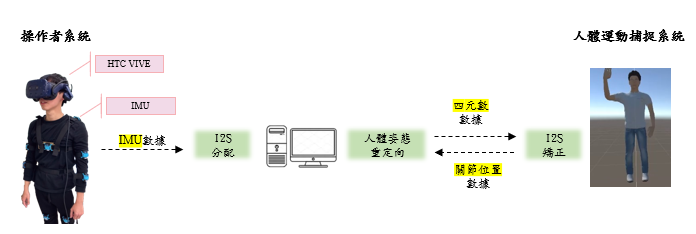
配置感測器於操作者之胸部、臀部、左右手之手腕、手軸、手臂、肩膀、左右腳之大腿與小腿,而感測器配戴方式為將每個感測器之燈號方向朝向軀幹,以軀幹為中心所配置。配戴感測器後,同時偵測全身感測器之四元數,透過藍芽傳輸四元數數據至電腦端,並將IMU依據關節分段儲存(IMU to segment, I2S),進行I2S分配與I2S矯正後即可透過四元數控制相對應之關節點旋轉,於Unity遊戲引擎內呈現出人體姿態。
系統特色
Record mode
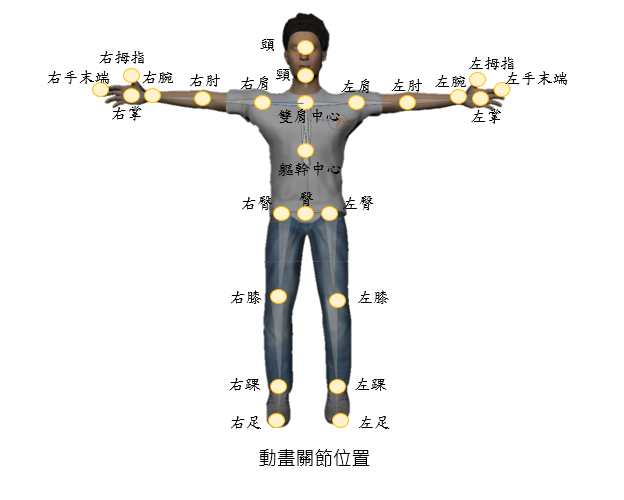
存取動畫骨骼中25個關節之三軸座標位置與對應時間點,透過錄製鍵與存取鍵將人體姿態依據csv格式做儲存。(於程式中可再加入其他部位的關節資訊與關節旋轉角)
Real-time mode
將動畫中25個關節位置資訊實時存取,並以txt格式存取並實時更新關節旋轉角與位置資訊。
系統架構
I2S 矯正
慣性感測器(IMU)與動畫人體模型各自擁有專屬的座標系,圖中紅色為X軸、藍色為Y軸、綠色為Z軸,IMU穿戴於人體身上後無法與Unity座標系相符合,需透過四元數運算將全身慣性感測器座標系轉換至Unity座標系,進行I2S矯正並紀錄正確四元數數值,以達成人體姿態重定向目標。
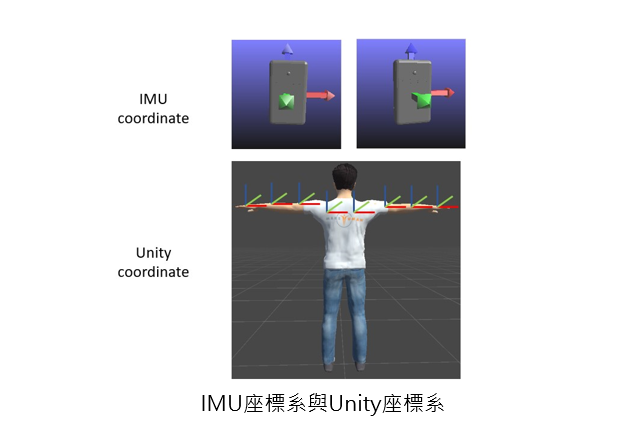
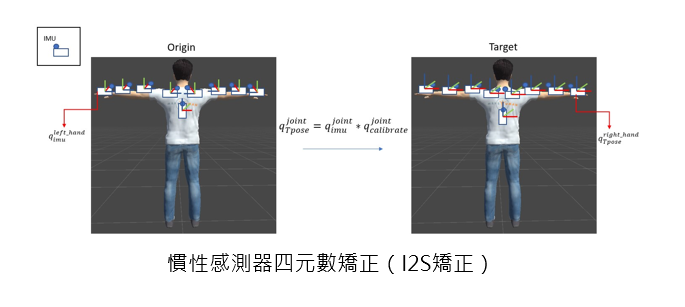
使用者穿戴慣性感測器時將以T-pose進行姿態矯正,下面影片中動畫呈現奇怪姿態,因IMU座標軸尚未與Unity座標軸對齊,操作者須保持T-pose,按下calibrate鍵,即矯正完畢,可呈現出人體正確姿態。

系統功能呈現
運動捕捉系統
運動捕捉系統即時動畫呈現
完整demo 影片: IMU in Unity Skeleton
可示化人體骨骼
錄製關節角度後於python端呈現人體骨骼姿態